What Is a Wound Rotor Motor? The Engineer’s Guide to Design, Laminations, and Real‑World Use
Every engineer who has started a big conveyor, a loaded hoist, or a mill knows the pain. You need serious starting torque. You want smooth acceleration. You can’t afford huge inrush current that drags down the plant bus. A wound rotor motor (also called a slip ring induction motor or WRIM) exists to solve that problem. It delivers high starting torque with controlled starting current, and it offers practical speed control without a full variable frequency drive.
This guide explains what a wound rotor motor is, how it works, and why laminations are central to its performance and cost. You’ll see where it outperforms squirrel cage designs, when it doesn’t, and what to specify so your next project runs efficiently and reliably.
In This Article
- The Design Problem You’re Solving
- How a Wound Rotor Motor Works
- Why Laminations Matter in WRMs
- Your Options Explained: Materials and Manufacturing
- WRM vs. Squirrel Cage and VFD Systems
- Applications That Fit Wound Rotor Motors
- Specifications, Sizing, and Control System Considerations
- Maintenance and Reliability
- Cost, Efficiency, and Lifecycle Trade‑offs
- Your Engineering Takeaway
The Design Problem You’re Solving
Let’s name the real-world challenge. You have a heavy or high inertia load such as a crane, hoist, large conveyor, rolling mill, crusher, or ball mill. Direct-on-line starting with a squirrel cage induction motor (SCIM) hits the grid with 5–8x full-load current. Voltage dips, protection relays chatter, mechanical shocks ripple through couplings and gearboxes. You need:
- High starting torque without the 5–8x inrush
- Smooth acceleration for mechanical protection
- Some speed regulation under load
- Robustness in harsh industrial environments
- Predictable maintenance and a long service life
A wound rotor induction motor meets these needs with rotor resistance control. It’s an asynchronous AC motor like a squirrel cage machine, yet its rotor is wound with insulated copper windings that connect to external resistors through slip rings and carbon brushes. That design unlocks high starting torque, low starting current, and adjustable speed.
Procurement cares about the trade-offs. WRMs cost more up front than SCIMs and they need more maintenance due to brushes and slip rings. They can run slightly less efficient than an equivalent squirrel cage motor because rotor resistance and brush friction burn energy. For the right applications the benefits outweigh those costs.
How a Wound Rotor Motor Works
At its core a wound rotor motor is an induction motor. It’s an AC motor with a stator and a rotor that never reaches synchronous speed under load, which is why we call it asynchronous.
Induction motor basics
- Stator: A three-phase stator winding fed by AC creates a rotating magnetic field. That field spins at synchronous speed Ns which equals 120 × frequency/pole count. Example: 60 Hz power with 4 poles gives Ns = 1800 RPM.
- Rotor: The rotating field cuts the rotor conductors which induces current in the rotor. The rotor current produces its own magnetic field that interacts with the stator field. That interaction creates torque.
- Slip: The rotor must lag the stator field to induce current. That lag is “slip” s = (Ns − Nr)/Ns. Zero slip makes zero induced current and zero torque. More slip means more rotor current and more torque up to a point.
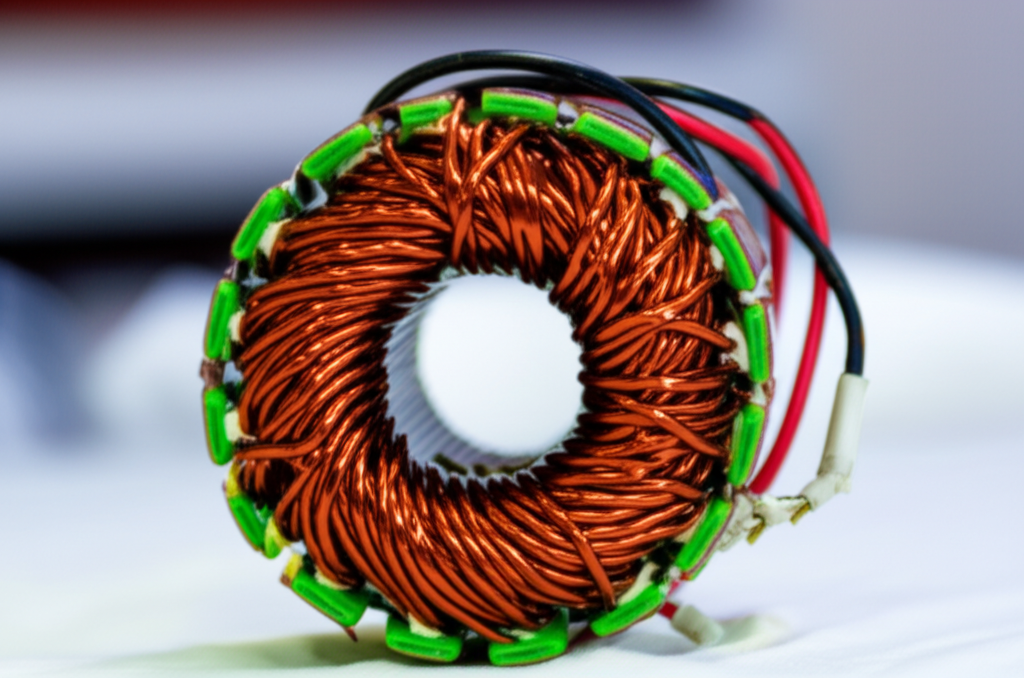
Wound rotor construction and slip rings
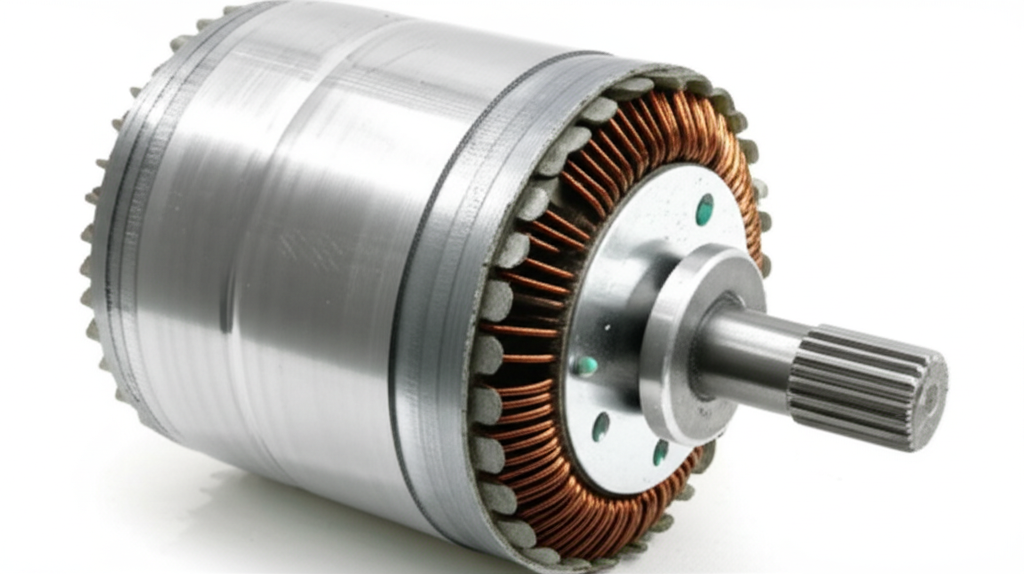
Unlike a squirrel cage rotor with uninsulated bars and end rings, a wound rotor uses insulated copper windings on a laminated rotor core. Each phase connects to a slip ring mounted on the shaft. Carbon brushes ride those rings to connect the rotor circuit to an external resistance bank. You can insert additional resistance during starting then trim it as the motor accelerates.
- External resistors increase rotor resistance which pushes the maximum torque point toward lower speed and boosts starting torque for a given current.
- Because rotor resistance limits rotor current you limit stator current too. That reduces starting current and the associated voltage dips.
Torque-speed characteristics and adjustable speed
The torque-speed curve of a wound rotor motor changes with rotor resistance. You can select a resistance value that:
- Maximizes starting torque at standstill
- Limits inrush current to about 2–3x full-load current instead of 5–8x
- Enables smooth acceleration by staging resistance steps or by using a liquid rheostat for continuous control
Once at speed many WRMs short the slip rings with a shorting device so the motor runs like a squirrel cage machine. If you leave some resistance in circuit you can run at reduced speed under load. This is simple speed regulation though it burns slip energy in the resistors.
Engineers sometimes go further with slip energy recovery systems (Scherbius or Kramer drives). These feed slip power back to the supply through power electronics which improves efficiency over pure resistor control for constant-speed reduction applications.
Power factor and efficiency
WRMs behave like other induction motors in terms of magnetizing current and power factor. You can improve power factor with capacitors at the MCC or with a VFD on the line side. Efficiency depends on stator copper loss, rotor copper loss, core loss, mechanical loss, and stray load loss. Additional rotor resistance and brush friction increase losses when the resistor bank is active.
Why Laminations Matter in WRMs
Laminations sit at the heart of any induction motor. They shape magnetic flux, set core loss, and influence noise and vibration. In a wound rotor motor both the stator and the wound rotor core use thin insulated sheets of electrical steel stacked into a core. The quality of those laminations drives motor efficiency, thermal behavior, and stability.
Here’s the physics in plain terms.
- Eddy current loss: A changing magnetic field induces small loop currents in the steel. Think of eddy currents like tiny electrical whirlpools. They swirl and heat the steel which wastes energy.
- Hysteresis loss: The steel’s magnetic domains flip back and forth with each AC cycle. That flipping takes energy every time, which appears as heat.
Thinner laminations with good insulation break big eddies into tiny ones which cuts eddy current loss. Better steel with lower coercivity reduces hysteresis loss. Both reduce heat so you can run higher magnetic flux density without running into temperature or saturation limits.
Analogy time: Magnetic permeability measures how easily magnetic field lines pass through a material. It’s like how easily a sponge soaks up water. High permeability steel pulls magnetic flux into the core instead of letting it leak into the air. That helps achieve torque efficiently.
Key lamination factors you should care about:
- Electrical steel grade and texture: Grain-oriented steels excel along the rolling direction which helps transformers more than rotating machines. Non-grain-oriented silicon steels are common for motors because they perform more uniformly in all directions.
- Lamination thickness: Thinner sheets reduce eddy currents. Motors often use 0.35 mm or 0.50 mm thicknesses. High-frequency machines may go thinner.
- Insulation coating class: An inorganic coating between laminations provides interlaminar resistance. Proper coating reduces circulating currents between sheets and survives punching and stacking.
- Annealing: Stamping induces mechanical stress which hurts magnetic performance. Proper annealing restores the B-H curve so the core loses less energy.
- Stack pressure and bonding: Tight stacks reduce vibration and noise. Mechanical interlocks, cleats, welding spots, or bonding adhesives keep the stack rigid without shorting laminations.
If you want a deeper look at material options across industries, see modern electrical steel laminations.
Stator laminations vs rotor laminations in a WRM
- Stator: The stator core carries the rotating field and the stator winding. Its slot geometry influences leakage inductance, power factor, and torque ripple. The quality of the stator core lamination directly affects motor efficiency and acoustic noise.
- Rotor: The wound rotor uses a similar laminated core with slots for the insulated rotor windings. Slot shape, skew, and stack rigidity shape torque ripple and vibration. Precise rotor core lamination geometry supports smooth acceleration and reliable slip ring operation.
By dialing in the core design you cut core losses and temperature rise. Lower heat extends insulation life which directly affects reliability and maintenance intervals. If your plant battles high ambient temperatures or restricted ventilation you’ll feel the difference.
Your Options Explained: Materials and Manufacturing
You have two big levers: material selection and how you make and assemble the laminations. Both influence performance, cost, lead time, and repeatability.
Material considerations
- Silicon steels (M-grades): The workhorse choice for induction motors. Affordable and predictable. They deliver a solid balance of loss, permeability, and saturation levels for 50/60 Hz operation. Great for general-purpose industrial motors including WRMs used in conveyors, fans, pumps, crushers, and mills.
- Non-grain-oriented (CRNGO) vs grain-oriented (CRGO): CRNGO offers isotropic magnetic behavior which suits rotating machines. CRGO shines in transformers and EI/UI cores because its grain orientation reduces loss along the rolling direction.
- High-silicon or high-permeability steels: When you need lower core loss at higher flux densities. Useful for high power density machines or when you push toward the top of NEMA or IEC efficiency classes.
- Cobalt alloys: When weight or temperature headroom matters like aerospace or very high power density machines. They cost more.
- Amorphous and nanocrystalline: Exceptional core loss performance at high frequencies. These find more use in transformers and specialty motors than in typical WRMs at 50/60 Hz.
If you need a broad overview across motor families, bookmark this page on motor core laminations.
Manufacturing and assembly processes
- Stamping vs laser cutting: Progressive die stamping rules in volume because it’s fast and cost-effective once tooled. Laser cutting suits prototyping and low-volume runs or intricate geometries. It avoids tooling lead time and lets you iterate on slot shape or skew easily. Stamping work-hardens edges which increases loss unless you anneal afterward. Laser cutting can create a heat-affected zone so you still need controlled processes and post-treatment for best magnetic performance.
- Post-punch annealing: Restores magnetic properties after stamping. Critical when you push for premium efficiency or low noise targets.
- Insulation coatings: Choose a coating class that balances electrical resistance, temperature rating, and punchability. You want good interlaminar resistance without flaking during stacking.
- Stack build: Interlocking laminations act like LEGO bricks. They create rigid stacks without long welds which can short sheets and raise losses. Spot welding or cleating can work if you keep heat input low. Bonding adhesives can reduce noise and vibration while distributing stress.
- Skew: Slight stator or rotor skew reduces cogging and torque ripple. WRMs often skew the rotor to smooth acceleration under external resistance control.
- Rotor windings and slip rings: Rotor slot geometry must accept heavy-gauge insulated conductors. Robust insulation systems and tight winding practices matter because circulating currents and heat stress the rotor during high-slip operation. Slip rings are commonly bronze or brass, and carbon graphite brushes ride on them. Spring-loaded brush holders maintain proper pressure and contact area.
- External resistor bank: Metallic grid resistors or liquid rheostats set the rotor resistance. Grid resistors are simple and robust. Liquid rheostats offer fine, continuous resistance control which makes for silky starts on huge high inertia loads.
Control system integration
- Soft starters vs rotor resistance control: A soft starter on a SCIM reduces voltage and current, yet it also reduces torque roughly with the square of voltage. That often leaves you torque-starved on heavy starts. WRM rotor resistance boosts starting torque at a given current which is why it wins in this niche.
- VFDs: A VFD plus a SCIM provides wide speed range with high efficiency. Many plants default to this today. WRMs still hold an advantage when the load demands very high starting torque with minimal inrush and when the installation environment makes VFDs challenging due to harmonics or long cable runs.
- Protection and MCC: Use appropriate motor protection relays for thermal, ground fault, stall, and phase loss. Coordinate breaker curves with the reduced starting current profile of the WRM. Place the resistor bank and liquid rheostat in ventilated or cooled enclosures as needed.
WRM vs. Squirrel Cage and VFD Systems
You can think of it as three paths to the same outcome: get the load moving safely and efficiently.
- Starting torque
- WRM: Very high starting torque, often 200–300% of full-load torque when tuned with external resistors.
- SCIM DOL: Typically 100–150% for standard designs unless you use special rotors.
- SCIM with soft starter: Reduced torque because you cut voltage.
- Starting current
- WRM: About 2–3x FLA during start with external resistance in circuit.
- SCIM DOL: 5–8x FLA is common.
- SCIM with soft starter: 2–4x FLA depending on ramp.
- Speed control
- WRM: Limited turndown by leaving resistance in circuit. Simple and rugged yet lower efficiency during speed reduction.
- SCIM + VFD: Wide speed range with high efficiency and great process control.
- Efficiency
- WRM: Slightly lower in normal operation due to brush friction. Lower during speed reduction because resistors burn slip energy.
- SCIM + VFD: High across a wide range. VFD switching adds small losses.
- Maintenance
- WRM: Brushes, slip rings, brush dust, resistor bank checks. Bearings and cooling like any motor.
- SCIM: Mostly bearings and cooling.
- Cost
- WRM: Higher purchase price plus resistor bank and more complex control. Predictable maintenance costs.
- SCIM + VFD: Higher system cost when you consider the drive and filters. Lower mechanical maintenance at the motor.
Pick the tool that matches the job. WRMs shine when you need soft starting with high torque on heavy and high inertia loads. VFDs shine when you need broad speed control and efficiency.
Applications That Fit Wound Rotor Motors
You’ll find slip ring motors in industries where heavy starts and smooth acceleration protect both the grid and the machine:
- Cranes and hoists in ports or steel plants
- Elevators and lifts that need precise starting torque
- Conveyor systems in mining, cement, and bulk materials handling
- Ball mills, crushers, and grinders in minerals processing
- Rolling mills and extruders that demand gentle ramping
- Large pumps and fans in older plants where WRMs remain installed
- Oil & gas, pulp & paper, and cement processes with fluctuating loads
These applications value the WRM’s adjustable speed control, low starting current, and high starting torque. They also accept the maintenance on brushes and slip rings because the process benefits outweigh it.
Conceptual case example: High-capacity mine conveyor
A kilometer-long conveyor starts fully loaded with ore. A squirrel cage motor started DOL would pull 6–7x FLA which drags the mine’s electrical grid. The shock also threatens the belt and gearboxes. The site adopts a 1.5 MW wound rotor motor with a liquid rheostat. Operators ramp resistance down smoothly which keeps starting current near 2.5x FLA and delivers a controlled torque profile. The conveyor starts without belt flap or gearbox hammering. Crews inspect brushes and the rheostat fluid during scheduled outages. Decades later the system still runs because the WRM solves the core job reliably.
Specifications, Sizing, and Control System Considerations
If you’re scoping a WRM, walk through this checklist before you commit.
- Load profile
- Determine torque-speed characteristics of the driven machine. Think breakaway torque, accelerating torque, and steady-state torque across RPM.
- Identify inertia. High inertia loads drive the need for prolonged high slip operation during start which stresses rotor windings and resistors.
- Power rating and speed
- Horsepower/kilowatt and base RPM. Note synchronous speed (poles and frequency) and target slip at load.
- Consider NEMA or IEC motor ratings and duty cycles. Heavy duty starts and frequent stops? Size the rotor circuit accordingly.
- Voltage and current
- Three-phase supply voltage and frequency. Check short-circuit level at the MCC to coordinate protection. Account for starting current limits set by the utility or plant.
- Enclosure and cooling
- Choose enclosure type for the environment: TEFC, IP55+, or higher for dust and moisture. Harsh mining or cement environments need robust sealing and filtration.
- Cooling methods influence heat dissipation. Bigger frames and better cooling ease temperatures during prolonged high slip starts.
- Insulation class and temperature rise
- Pick insulation class with margin. High ambient and repeated starts raise thermal stress on both stator and rotor windings.
- Rotor resistor system
- Decide between metallic grid resistors and liquid rheostats. Metallic grids are straightforward and rugged. Liquid rheostats enable fine control for ultra-smooth starts.
- Ensure resistor power and duty rating match the starting cycle. Monitor temperature and provide ventilation.
- Power factor and harmonics
- If you add a VFD for line-side control, plan for harmonics and filters. Otherwise consider power factor correction capacitors at the MCC.
- Protection and coordination
- Use a dedicated protection relay that understands motor thermal models. Include ground fault, phase loss, stall, and overload functions.
- Coordinate the circuit breaker curves with the expected starting current profile. Right-size cables and lugs for both running and starting conditions.
- Standards and documentation
- Align with IEC 60034 series and NEMA MG 1 for ratings and definitions. When you draft a motor specifications sheet, state the required starting torque, maximum allowable starting current, number of starts per hour, and permissible temperature rise.
Maintenance and Reliability
WRMs run for decades if you follow a sensible maintenance plan. The mechanical wear points deserve routine attention.
- Brushes and slip rings
- Inspect brush length and contact surface. Replace brushes before they hit the minimum. Match brush grade to the slip ring material for stable film formation.
- Clean the rings and remove brush dust. Dust can be conductive and abrasive. Maintain brush holder alignment and spring pressure.
- Resistor bank or liquid rheostat
- Check connections for hot spots. Examine grid resistors for cracked elements. Keep liquid rheostats within the specified concentration and level.
- Bearings and lubrication
- Follow the manufacturer’s intervals. Vibration analysis catches misalignment, looseness, or bearing issues early.
- Cooling and airflow
- Clean filters and ducts. Monitor stator and rotor temperatures. Heat kills insulation so this pays off.
- Environment
- Dust, moisture, and corrosive vapors attack the brushgear and windings. Pick the right enclosure rating and add heaters as needed.
- Condition monitoring
- Track vibration, bearing temperature, stator RTD readings, and current signature. Unusual torque-speed behavior during start can hint at resistor bank drift or brush contact issues.
Frequent starts and stops? A wound rotor motor handles them better than a DOL squirrel cage motor because it soft starts without huge current spikes. You still need to respect thermal cycling limits.
Cost, Efficiency, and Lifecycle Trade‑offs
Let’s talk money and energy in practical terms.
- Capital cost
- A WRM typically costs more than a SCIM of the same power because of the wound rotor, slip rings, brushgear, and external resistor system. You also need control cabinets and interlocks in your Motor Control Center.
- Operating cost
- Routine maintenance covers brushes, slip ring cleaning, and resistor bank checks. You’ll schedule short outages for inspections and dust removal.
- Energy efficiency
- When the rotor circuit is shorted and the motor runs near base speed, efficiency is close to a comparable SCIM. During speed reduction with resistors, efficiency drops because slip energy burns in the resistors. If speed control is frequent and significant, a VFD on a SCIM often wins on energy.
- Reliability and uptime
- WRMs have more moving electrical contacts than SCIMs, yet they deliver reliable service in punishing environments. Good lamination stacks, solid rotor windings, and proper cooling keep the core intact for decades. Many motors in mining and cement run 20–30 years with proper maintenance.
- Grid impact
- A DOL cage motor can cause voltage dips and nuisance trips. A WRM reduces starting current which protects the broader electrical power input and sensitive loads on the same bus.
When you present a business case, weigh capital and operating costs against reduced downtime, protection of mechanical power transmission systems, and the avoided cost of grid upgrades to handle DOL starting.
Your Engineering Takeaway
If you’re choosing a motor for heavy starts, don’t guess. Use the wound rotor motor’s strengths where they matter and lean on laminations to secure performance headroom.
Key points to remember:
- A wound rotor motor is an induction motor with a wound rotor, slip rings, and carbon brushes that connect to external resistors. This enables high starting torque and low starting current with smooth acceleration.
- Slip matters. Torque comes from slip and rotor current. External rotor resistance reshapes the torque-speed characteristics so you can start heavy loads without punishing the grid.
- Laminations drive efficiency. Thinner, well-insulated laminations with the right steel grade reduce eddy current and hysteresis losses which lowers heat and boosts motor efficiency.
- Manufacturing choices count. Stamping vs laser, annealing, insulation coatings, interlocking or bonding, and skew all influence loss, noise, and repeatability.
- WRMs fit high inertia and heavy load applications like cranes, hoists, conveyors, mills, crushers, and rolling mills. They compete with SCIM plus soft starters and with VFD-driven systems. Pick based on torque, current limits, speed control needs, and maintenance appetite.
- Standards guide you. Use IEC 60034, NEMA MG 1, and IEEE guidance for ratings, efficiency definitions, and testing methods.
Next steps you can take now:
- Document your load’s torque-speed curve, breakaway torque, inertia, and required acceleration time. This drives rotor resistor sizing.
- Specify the allowed starting current and target starting torque in your motor specifications sheet. Include the number of starts per hour and environmental constraints.
- Align lamination requirements with your efficiency and noise goals. Confirm lamination material, thickness, insulation coating, and post-punch anneal.
- Review your enclosure, cooling method, and protection scheme. Plan brush and slip ring maintenance intervals upfront.
- If you’re comparing motor core solutions, learn how stator and rotor laminations impact your design and sourcing. You can start by reviewing stator core lamination, rotor core lamination, and broader electrical steel laminations options across grades. For a big-picture view across machine types, consider the landscape of motor core laminations.
A final word on language and scope. You saw terms like power factor, synchronous speed, slip, and torque-speed characteristics because they explain how the machine works and how it connects to your grid and process. If you want speed control beyond a small turndown range without the resistor losses, a SCIM paired with a VFD gives you that flexibility. When the job calls for a high-torque soft start and rugged simplicity, a wound rotor motor still earns its spot on the plant floor.
—
Appendix: Quick reference index of related concepts and terms you may encounter while specifying or discussing wound rotor motors and their ecosystems
- Types and families: Induction motor, asynchronous motor, AC motor, wound rotor induction motor (WRIM), squirrel cage induction motor (SCIM), cascaded motor
- Key parts: Stator, rotor, slip ring, brushes, stator winding, rotor winding, brush holder assembly, shaft, bearings, cooling fan, enclosure
- Performance topics: Starting torque, starting current limitation, power factor, efficiency, synchronous speed, slip, torque-speed characteristics, speed regulation techniques, dynamic braking, regenerative braking
- Control and drives: Motor control systems, soft start motor, Variable Speed Drive (VSD), Variable Frequency Drive (VFD), frequency converter motor, power electronics for motors, drive system components, motor starter types
- Industries and applications: Cranes, hoists, conveyors, pumps, fans, mills, crushers, rolling mills, mining industry, cement industry, oil & gas industry, pulp & paper industry
- Standards and ratings: NEMA motor ratings, IEC motor standards, IEEE references
- Practicalities: Motor protection devices, protection relay for motors, circuit breaker motor, motor specifications sheet, motor installation guide, troubleshooting wound rotor motors, motor repair services
- Design and materials: Electrical machine theory, motor design principles, rotor winding design, stator winding connections, electromagnetic field generation, magnetic flux density, induced current in rotor, back EMF, component parts of WRM, motor enclosure types, motor insulation class, motor cooling methods
- Sizing metrics: Mechanical power output, electrical power input, horsepower (HP), kilowatt (kW), revolutions per minute (RPM), load characteristics
- Operations and maintenance: Motor maintenance, motor vibration analysis, motor noise reduction, motor heat dissipation, motor reliability factors, motor lifespan expectancy
- Infrastructure: Motor Control Center (MCC), electrical grid impact, power transmission systems
If you keep these concepts straight, you’ll have more productive conversations with vendors like ABB, Siemens, GE, WEG, TECO, Baldor, or Marathon Electric. You’ll also cut through jargon when you compare offers, evaluate energy efficiency motors, and choose the right balance of cost, performance, and reliability for your application.