What Is a Servo Motor? Your Essential Guide to Precision Motion Control
Table of contents
- Introduction: Demystifying the servo motor
- How a servo motor works: The closed-loop heart
- Command signal and controller
- Servo drive or amplifier
- The motor itself: stator, rotor, magnets, windings
- Feedback devices: encoders, resolvers, Hall sensors
- Error correction and tuning
- Types of servo motors and where each shines
- By power source: AC, DC, BLDC
- By motion: rotary vs linear
- By size and application: RC and hobby vs industrial
- Key characteristics and advantages you can count on
- Real-world applications I’ve worked with and why servos win
- Servo vs stepper: How I choose between them
- Components that make or break performance
- Sizing and selection: A practical guide I use
- Controls and tuning tips that save hours
- Maintenance, troubleshooting, and safety
- Future trends: Smart servos and the road ahead
- Conclusion: The backbone of modern precision
Introduction: Demystifying the servo motor
I still remember the first time I tuned a servo on a packaging line. The new machine cut labels faster than the old one ever could. It also chewed through ribbon until I fixed the tuning. Once the servo’s feedback loop locked in you could watch the knife hit its mark to within a hair. That day taught me a simple truth. A servo motor is all about precise control.
So what is a servo motor in plain English? It’s a rotary or linear actuator built to hit a target position, speed, or torque with accuracy. It does this with a closed-loop feedback system. The controller commands a motion. The feedback device reports what actually happened. The drive adjusts current so the motor corrects any error. That loop runs fast. You get precision, repeatability, and smooth motion.
These motors run the show in robotics, CNC machines, packaging equipment, printing presses, camera gimbals, and more. I use them when I need high torque through a wide speed range and excellent dynamic response. I use them when I can’t afford to lose a step or overshoot.
How a servo motor works: The closed-loop heart
A servo system has four core pieces. The controller, the drive or amplifier, the motor, and the feedback device. Wrap those in a feedback loop and you have a servo.
Command signal and controller
The controller sends a command signal. That might be a motion profile from a PLC, a PC-based controller, or a dedicated motion controller. In hobby gear it might be a simple PWM control pulse. In industry I often run over Industrial Ethernet for servo like EtherCAT or PROFINET. The message is the same. Move here now at this speed with this acceleration.
The controller can command:
- Position control for precise positioning and contouring
- Velocity control for smooth speed regulation
- Torque control when the process needs force or tension control
Servo drive or amplifier
The servo drive or amplifier takes power from the mains and turns it into controlled current for the motor phases. Current equals torque in a permanent magnet servo. So current control sits at the bottom of the control stack. Many drives run a cascaded loop. An inner current loop for torque. A middle velocity loop. An outer position loop.
Modern drives add features I lean on often. Jerk limiting, S-curve profiles, notch filters for resonance, and safe torque off for safety. Drives also support regenerative braking. The motor can push energy back into the DC bus during deceleration. You can dump the excess into a braking resistor or reuse it in multi-axis systems.
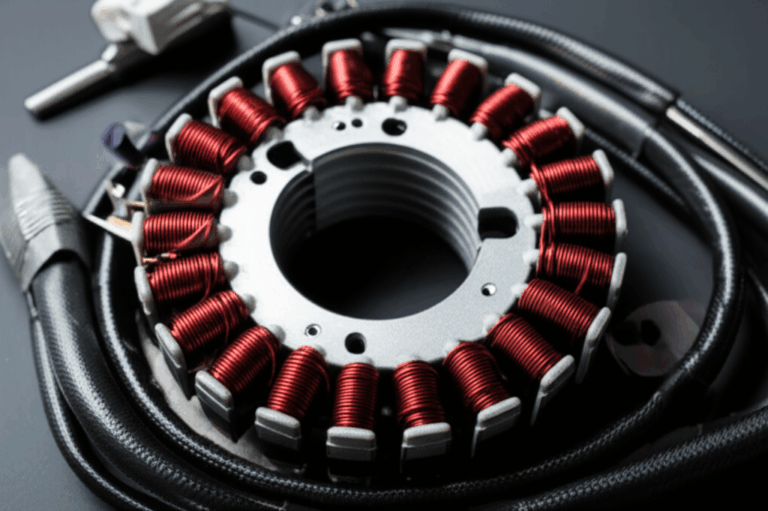
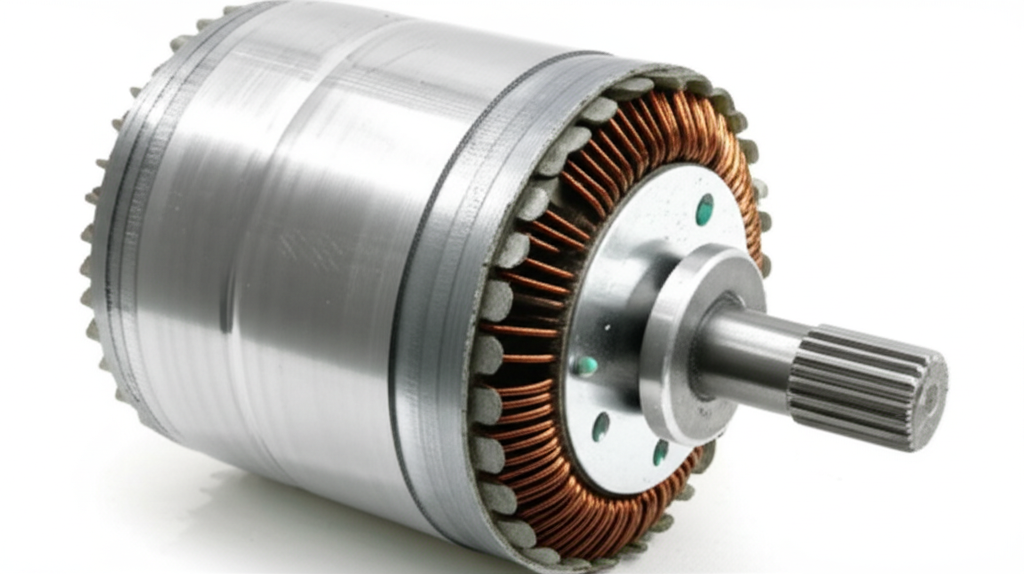
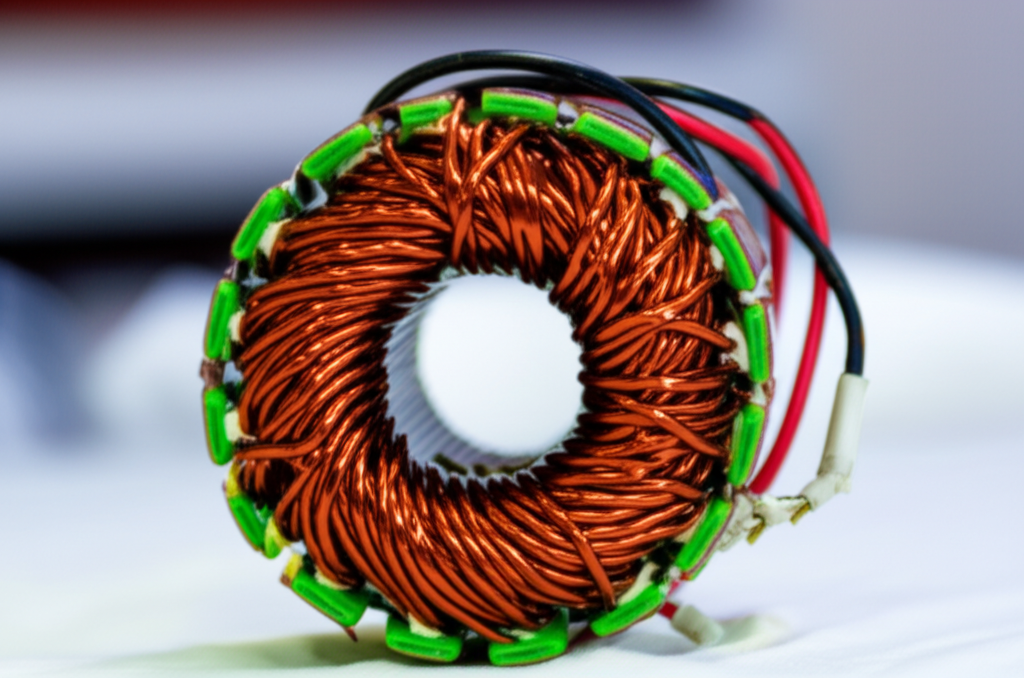
The motor itself: stator, rotor, magnets, windings
Under the hood you’ll find windings in the stator and magnets on the rotor in most servo motors. Brushless AC servos and brushless DC servos (BLDC) both fall into the permanent magnet synchronous motor family. The naming differs more than the physics. Coil currents create a rotating magnetic field. The rotor’s permanent magnets lock in step with that field. You get synchronous operation and high positional accuracy.
The magnetic circuit matters. Thin laminations reduce eddy current losses. Tighter stacks improve power density and efficiency. When I specify motors I pay attention to lamination quality in both the stator and rotor since it directly affects heat and performance. If you want to dig into the construction side you can read more about:
- The role of the stator core lamination
- Why a balanced rotor core lamination reduces vibration
- How complete motor core laminations set the stage for efficiency and torque
- The metallurgy behind high-grade electrical steel laminations that cut core loss
Servo motors often pair with gearboxes. Planetary gearboxes or harmonic drives trade speed for torque and resolution. A harmonic drive shines in robotics and camera gimbals because it offers zero backlash with compact size.
Feedback devices: encoders, resolvers, Hall sensors
Feedback closes the loop. Incremental encoders count pulses and give you relative position and velocity. Absolute encoders report a unique position for every shaft angle. That means the system knows its position on power-up with no homing. Resolvers use analog signals in a rugged electromagnetic transformer. They handle heat and vibration well. Hall effect sensors provide commutation feedback. They tell the drive which phase to fire but they don’t give fine position resolution.
In RC servos you’ll often see a potentiometer used as a simple position sensor. It works for small travel and low cost. In industrial systems I favor high-resolution absolute encoders for tight positional accuracy and easy startup.
Error correction and tuning
Here’s where the magic happens. The controller compares commanded position to actual position. The difference is the error. The drive applies torque to shrink that error. PID control sits at the core. Proportional gain pushes against error. Integral gain clears steady-state error. Derivative gain damps the motion. Too much gain and the system overshoots or vibrates. Too little and it feels sluggish.
I’ve tuned dozens of axes on the floor. Three tips keep saving me time:
- Match inertia. If the load inertia dwarfs the motor inertia the system fights you. Add a gearbox or rethink the mechanics.
- Raise current limits carefully. You get snap but you can also excite resonances. A notch filter or mechanical stiffening solves what gains alone can’t.
- Use a good motion profile. S-curve limits jerk so the axis doesn’t shock the load. Product quality often improves instantly when you move from trapezoidal to S-curve motion.
Types of servo motors and where each shines
Not all servos are built the same. I choose based on power source, motion type, and application scale.
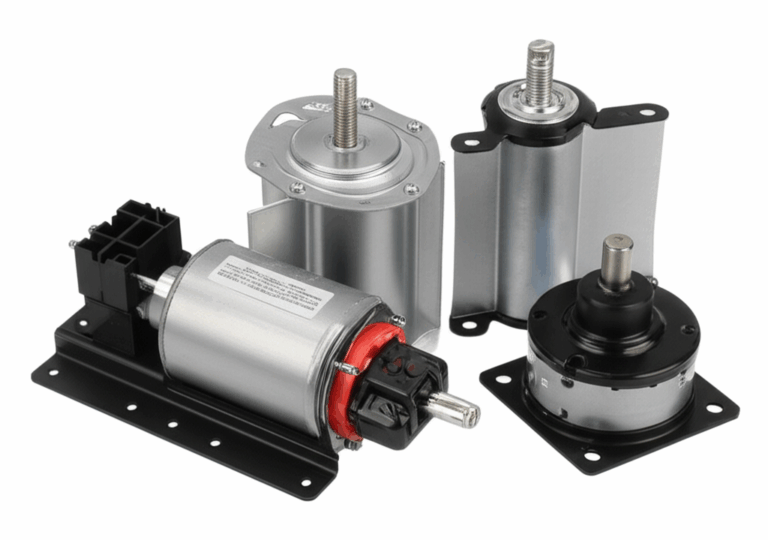
By power source: AC, DC, BLDC
- AC servo motors. These dominate industrial automation. They deliver high torque density, a wide speed range, and excellent dynamic response. You’ll see them in CNC machines, packaging lines, and robotics.
- DC servo motors. Older designs used brushed DC for simplicity. Brushed DC works for small projects or legacy gear yet brushes wear and limit life. Modern “DC servos” usually mean BLDC with electronic commutation.
- Brushless DC (BLDC) servo motors. Same permanent magnet core idea with DC-style control schemes. BLDC servos run efficiently and last long since there are no brushes. You’ll find them in drones, gimbals, and many integrated smart servos.
By motion: rotary vs linear
- Rotary servo motor. The workhorse. It spins a shaft that you couple to a gearbox, belt, or ball screw.
- Linear servo motor. It makes straight-line motion directly. No screw or belt. Think of it as a “unrolled” rotary servo. You get micron-level accuracy and stunning acceleration. I use linear servos in semiconductor handling and high-speed pick-and-place when every millisecond counts.
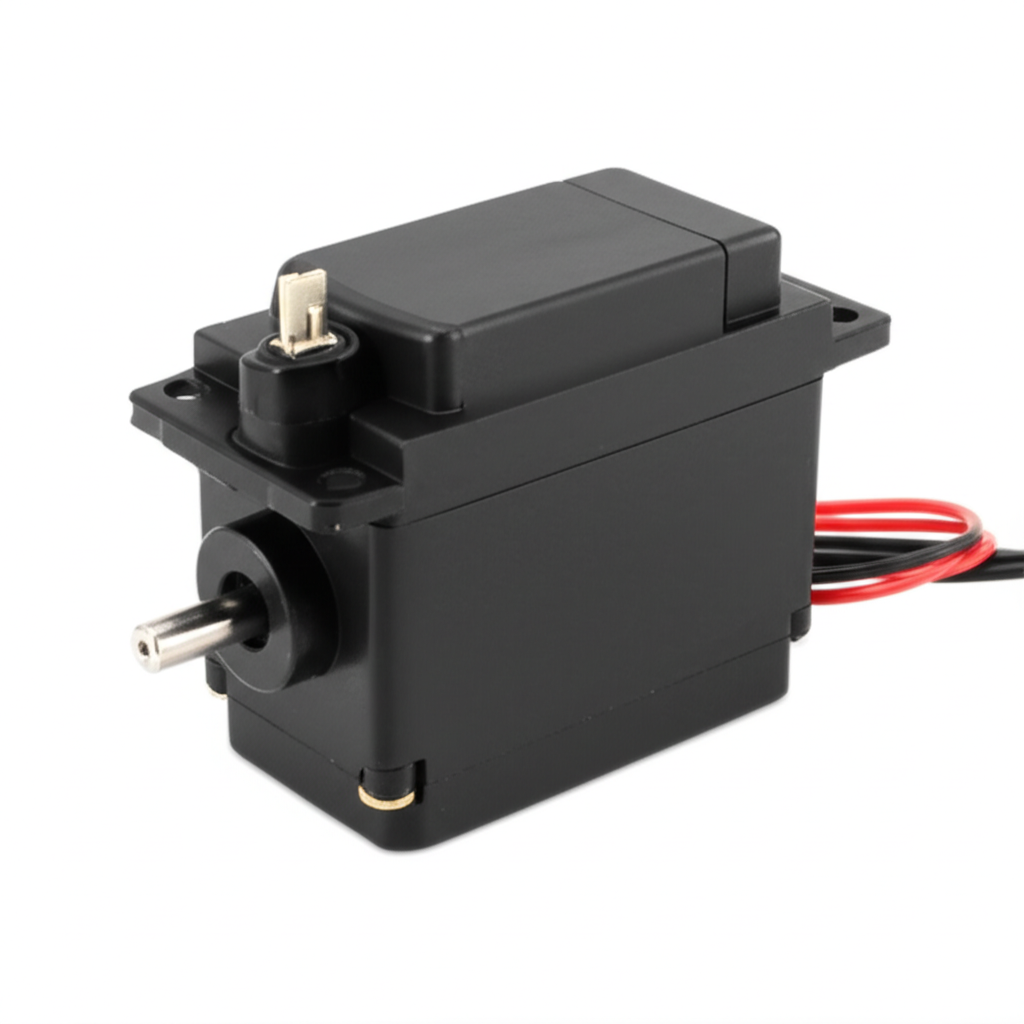
By size and application: RC and hobby vs industrial
- Hobby or RC servos. Micro, mini, and standard sizes. Cheap, compact, and simple. A PWM control pulse sets the angle. Perfect for small robots, RC planes, and pan/tilt mechanisms.
- Industrial servos. Rugged, sealed, and designed for continuous duty. They support high-resolution encoders, torque, velocity, and position modes. They also integrate with motion control systems and Industry 4.0 diagnostics.
Digital vs analog RC servos also matters. Digital servos update motor drive signals faster. You get sharper response and better holding torque at the cost of higher power draw.
Key characteristics and advantages you can count on
Why do engineers reach for servos so often? Because they hit a rare combination of traits.
- Unrivaled precision and positional accuracy. Industrial systems often achieve 0.001 to 0.01 degrees in rotary axes or micron-level for linear motion. I’ve seen wafer handlers repeat all day without visible drift.
- High torque across a wide speed range. Servos deliver usable torque from zero speed to high rpm. That lets you hold position under load without cooking the motor and then accelerate hard when needed.
- Excellent dynamic response. Quick acceleration and deceleration with tight control enables complex motion profiles. Delta robots hitting 150+ picks per minute make it look easy.
- High efficiency. A servo only draws what it needs. In intermittent duty applications I’ve measured significant energy savings over older drive technologies. Case studies report up to 30–50% reductions in energy in some retrofits when you replace inefficient methods with modern servo systems.
- Smooth motion and low noise. Proper tuning reduces vibration and noise. Harmonic drives and well-balanced rotors cut mechanical chatter. That matters in optics, medical devices, and high-end finishing.
- Reliability and long life. No brushes in modern servos. Bearings and encoders still wear. Good lubrication and clean cables go a long way.
- Wide control range. Position, speed, and torque modes let you tailor control to the process.
Real-world applications I’ve worked with and why servos win
I’ve deployed servo systems across a mix of industries. Each application leans on a different strength of the technology.
- Industrial automation. Multi-axis robots, SCARA arms, and CNC machines live on servo precision. Coordinated axes mill complex parts and hold tolerances that would be impossible with open-loop drives.
- Packaging machinery. Filling, sealing, labeling, cutting, and sorting all benefit from precise registration. I once solved a mislabel issue by switching to an absolute encoder and S-curve motion. Scrap rate dropped immediately.
- Printing presses. Servo-driven registration keeps print heads aligned with the moving web. The servo tracks speed changes and still nails the mark.
- Medical equipment. Surgical robots, lab automation, and imaging tables need smooth, predictable motion with low noise and high reliability.
- Aerospace and defense. Actuators for control surfaces and antenna or satellite dish positioning need precision and resilience.
- Semiconductor manufacturing. Wafer handling and inspection rely on linear servos and high-resolution encoders for micron-level work.
- Consumer and commercial. Camera gimbals, pan/tilt mechanisms, drones, and remote control vehicles use compact BLDC servos for stability and control.
Two brief case notes:
- CNC machining. A shop I supported upgraded to multi-axis AC servos with high-resolution absolute encoders. The machine cut cycle time by roughly a quarter and improved finish quality. Coordinated motion and better dynamics did the heavy lifting.
- High-speed pick-and-place. A delta robot with brushless AC servos hit well over 150 picks per minute with ±0.02 mm repeatability. Packaging throughput jumped and the maintenance crew slept better at night.
Servo vs stepper: How I choose between them
People often ask if they should use a stepper motor instead. My answer depends on the job.
- Accuracy. A servo runs closed loop and corrects errors. A stepper can lose steps under load unless you add feedback.
- Speed. Servos maintain torque at high speed. Steppers drop torque as speed rises.
- Torque. Servos provide strong torque over a broad range and deliver holding torque efficiently. Steppers have high low-speed torque but sag fast at higher rpm.
- Feedback. Servos require encoders or resolvers. Steppers are typically open loop though closed-loop stepper systems exist.
- Cost and complexity. Steppers cost less and set up faster. Servos cost more and need tuning and system integration.
- Efficiency. Servos draw current as needed. Steppers often draw rated current even at idle.
- Applications. I pick servos for robotics, CNC, packaging, and anything with variable loads or tight precision. I pick steppers for cost-sensitive, low-speed, fixed-position tasks like simple indexing, light-duty 3D printers, or small scanners.
If you’re comparing servos to induction motors with VFDs the rule of thumb is simple. Use a VFD for simple speed control on pumps or fans. Use a servo when you need precise position, torque control, or rapid dynamic response.
Components that make or break performance
I’ve learned to look beyond the shiny motor housing. The details decide your success.
- Motor construction. Stator design, slot geometry, skewing, and magnet grade shape the torque ripple and efficiency. Quality laminations and careful rotor balancing reduce vibration and noise.
- Gearboxes and harmonic drives. Gear reduction raises torque and resolution yet adds compliance and backlash. Harmonic drives give near-zero backlash which helps robotics, gimbals, and small precision axes.
- Ball screws and linear motors. Rotary servos plus ball screws deliver accurate linear motion with good stiffness. Linear motors skip the screw and go straight to magnetic thrust which gives insane acceleration and micron-level accuracy.
- Encoder selection. Incremental encoders work well for many systems. Absolute encoders simplify startup and improve reliability because you can avoid homing sequences and collision risks. Resolvers handle heat and shock better than many optical encoders.
- Drive features. Jerk limiting, notch filters, torque ripple compensation, and anti-resonance algorithms turn a twitchy axis into a smooth one.
- Networking and integration. Industrial Ethernet options bring tight synchronization across axes. That matters in multi-axis contouring and coordinated robotics.
- EMC and cabling. Grounding and shielding prevent encoder noise and false faults. I always route power and feedback cables with separation. It looks fussy until you avoid a day of chasing phantom alarms.
Sizing and selection: A practical guide I use
Servo motor sizing feels like detective work. It pays off because an undersized or oversized servo causes pain either way.
Here’s my process:
When in doubt I ask the vendor’s application engineer to validate the numbers. Brands like Yaskawa, Mitsubishi Electric, Fanuc, Bosch Rexroth, Siemens, Rockwell Automation, Panasonic, Kollmorgen, Omron, Beckhoff, Lenze, Parker Hannifin, Delta Electronics, ABB, and WEG publish solid selection guides. I also watch NEMA and IEC standards for shaft sizes, flanges, and safety requirements.
Controls and tuning tips that save hours
Good tuning turns a decent machine into a great one. Here’s what I’ve learned.
- Start with the mechanics. Tighten belts. Check couplings. Replace tired bearings. You can’t tune away a loose machine.
- Work from inner to outer loops. Verify the current loop. Then tune velocity. Then position. Many drives automate this with auto-tune tools. I still validate by hand since every load is different.
- Set realistic motion profiles. S-curve profiles cut jerk which reduces vibration and improves part quality. Trapezoidal profiles are fast to compute but they shock the load.
- Use feedforward. Velocity and acceleration feedforward reduce tracking error without raising gains too much. You get sharper response without ringing.
- Filter with care. A notch filter knocks down a resonance. Over-filtering adds lag and masks problems. Fix mechanics first then filter what’s left.
- Mode selection matters. Torque mode shines for tension control or winding. Velocity mode works for smooth feeding. Position mode makes sense for point-to-point or contouring.
Hobby note. RC servo PWM control is simple yet powerful. A pulse width maps to a target angle. Digital RC servos sample faster and hold position harder which is useful for gimbals and small robotics.
Maintenance, troubleshooting, and safety
Servos don’t ask for much. They reward basic care.
- Keep them cool. Monitor temperature. Respect continuous torque ratings. Give them airflow or heat sinking as needed.
- Protect the cables. Crushed encoder cables cause intermittent faults that will drive you mad. Use strain relief and proper routing.
- Watch for vibration. Excess vibration hints at imbalance, loose hardware, or resonance. Fix the root cause before it trashes bearings or encoders.
- Check brakes. Many vertical axes use holding brakes. Test release and holding torque during preventive maintenance.
- Clean power and grounds. Line disturbances and ground loops cause nuisance trips. A good line filter and proper bonding save headaches.
- Leverage diagnostics. Smart servos feed error logs, condition metrics, and even life estimates into your PLC or cloud dashboards. Predictive maintenance gets easier when you can see bearing wear trends or temperature spikes. IoT integration and edge computing on drives help you catch problems before they stop the line.
Common faults I see:
- Overcurrent during accel. Reduce accel or increase voltage and current headroom.
- Encoder errors. Check connections and shielding. Replace damaged cables or the encoder.
- Following error trips. Adjust gains or motion profile. Check for mechanical binding.
- Thermal trips. Reduce duty cycle or improve cooling. Confirm motor and drive sizing.
Safety matters. Use safe torque off where required. Apply proper guarding and e-stops. Train operators on homing procedures and lockout-tagout.
Future trends: Smart servos and the road ahead
Three trends keep showing up in my projects.
- Smart servo motors. Drives and motors now ship with built-in diagnostics, torque signature analysis, and lifing models. That makes predictive maintenance practical. It also cuts downtime because the system helps pinpoint the issue.
- Higher power density and miniaturization. Magnetic materials keep improving. Cooling designs get clever. We fit more power in smaller frames which helps compact machines and collaborative robots.
- Integrated solutions. Motors with built-in drives and controllers simplify wiring and reduce panels. Industrial Ethernet streamlines synchronization. Commissioning gets faster which matters in high-mix manufacturing.
- Energy efficiency. Every watt saved reduces operating cost and heat. Regeneration and better core materials move the needle.
- Better encoders. Absolute encoders with higher resolution and improved noise immunity are becoming the default. Homing routines are slowly fading away on premium machines.
Market research backs up what I see on the floor. The global servo motors and drives market sat in the low tens of billions of dollars recently and continues to grow at a healthy pace. Automation and robotics drive demand. Robotics and machine tools show some of the fastest growth among applications. I also see clear environmental gains on modern retrofits. Precision cuts waste which saves material and energy.
Conclusion: The backbone of modern precision
If you asked me for a one-line answer to “What is a servo motor?” I’d say this. It’s a motor with a brain and a sense of touch. The controller tells it what to do. The feedback tells it what happened. The drive adjusts the current so the motor hits the mark.
I use servos when I need tight position control, strong torque over a wide speed range, and fast dynamic response. I use them when losing a step isn’t an option or when the process punishes sloppy motion. They run in robotics, CNC, packaging, printing, optical systems, medical equipment, aerospace actuators, and even your camera gimbal.
Choosing the right servo comes down to the basics. Size the motor to the load. Match inertia. Pick the right feedback. Tune the loops. Keep it cool and wired clean. Do that and a servo will deliver precision day after day. It becomes the quiet backbone of modern motion control.
Before you spec your next axis take a minute to think through the closed-loop chain. Command. Drive. Motor. Feedback. That loop defines what a servo motor is and why it works so well. Once you see it that way you can design better machines and fix problems faster. That’s been my experience on every line I’ve touched.